Corso FSE 2002 - Sistemi in tempo reale: applicazione alla robotica
Gran P-RIS
Il primo progetto del corso è ispirato ad una gara robotica (gran P-RIS) che ha avuto luogo in occasione della Legofest X organizzata da ItLUG (Bologna, 17 marzo 2002).
La gara consiste nel costruire il robot che percorra un percorso stabilito nel minor tempo possibile.
La pista consiste in un tracciato chiuso delimitato da bordi di colore definito, diversi tra loro e dal colore del fondo.
Gruppo 1
- Nicola Bergamaschi
- Luca Gualdi
- Davide Cerea
Gruppo 2
- Matteo Verzeletti
- Nicola Guerrini
- Stefano Fusi
Gruppo 3
- Ivan Roncali
- Daniele Lombardo
- Emanuele Cavassa
- Marco Buccio
- Giacomo Paini
- Marco Bernardoni
Gruppo 4
- Emanuele Aldrighi
- Mauro Dragoni
- Federico Gandellini
- Daniele Stroppa
Gruppo 5
- Roberto Becchetti
- Andrea Lorenzi
- Michele Schiavi
- Marco Margheritti
Il regolamento è molto simile a quello della gara originale.
-
La gara è composta da una serie di prove durante le quali un concorrente alla volta percorre un singolo giro del circuito.
Ogni concorrente ha a disposizione tre prove singole per cercare di realizzare il record della pista.
-
Vince il torneo il concorrente che, al termine di tutte le prove, avrà realizzato il miglior tempo sul giro.
-
Una giuria presiede al corretto svolgimento della gara ed ha la facoltà di decidere arbitrariamente nel caso si verifichino situazioni non esplicitamente contemplate dal regolamento.
Il numero di membri di cui la giuria è formata va da 1 a 3.
-
Ogni scuderia può presentare fino ad un massimo di due concorrenti.
-
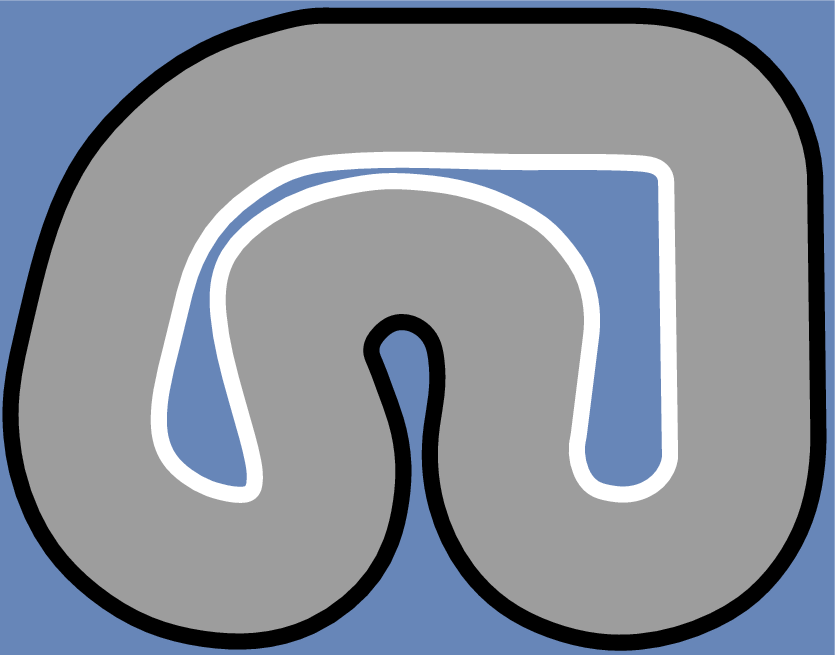
Il campo di gara, è costituito da una pedana rettangolare approssimativamente di 250 cm x 200 cm.
Su tale pedana è tracciato un circuito di colore grigio (35%) e carreggiata 40 cm, delimitato da due bordi larghi 5 cm, uno interno bianco ed uno esterno nero.
La corsa si svolgerà in senso antiorario sul circuito, in modo che i robot abbiano sempre il bordo bianco a sinistra e quello nero a destra.
 pdf ps
pdf ps
-
Nel caso un concorrente esca inavvertitamente dal circuito, il proprietario può fermarlo, rimetterlo in pista in prossimità del punto di uscita e farlo ripartire dopo 5 secondi di penalità.
-
Se un concorrente "perde l'orientamento" e procede in direzione sbagliata, il proprietario può fermarlo, orientarlo correttamente (ma non spostarlo) e farlo ripartire dopo 5 secondi di penalità.
-
Il concorrente non può deliberatamente depositare pezzi o sottoinsiemi di alcun tipo sul circuito.
La giuria provvederà a rimuovere dal campo di gara ogni parte del concorrente che si trovi permanentemente separata dal corpo principale del medesimo.
-
Il robot non può memorizzare il percorso, ne essere "istruito" prima della partenza.
I giudici hanno facoltà di cambiare la posizione della linea di partenza all'interno del circuito tra una prova e l'altra.
-
Il robot non può seguire costantemente uno dei bordi, cioè non può comportarsi come un "line follower".
La giuria può squalificare un robot che resta allineato sul bordo per più di pochi centimetri consecutivi.
-
I concorrenti sono robot autonomi costruiti unicamente con pezzi originali Lego,salvo eccezioni espressamente previste.
-
Il robot può utilizzare una sola unità programmabile originale Lego.
-
Il robot può utilizzare al massimo 2 motori originali Lego.
-
Il robot può utilizzare al massimo 1 sensore di luce originale e due sensori di contatto originali.
Altri tipi di sensori, originali e non, non sono ammessi.
-
Il robot può avere una larghezza massima, fuori tutto, di 16 unità Lego (12,8 cm).
Non esistono limitazioni in lunghezza, altezza, peso, numero e tipo di pezzi utilizzati.
-
Non sono ammessi robot controllati dall'esterno tramite telecomandi, radiocomandi, comandi vocali o altri mezzi di qualsiasi natura.
-
Il robot può essere programmato con qualsiasi software: Lego, NQC, legOS, pbForth, leJOS ecc.
La giuria ha il diritto di esaminare e ricaricare il codice di ogni concorrente prima di ogni incontro.
-
Il codice non può più essere modificato dopo l'inizio del torneo.
Al fine di permettere la messa a punto finale o la taratura del codice sarà prevista una sessione di prove libere prima degli incontri.
Primo
- Gruppo 3 (tempi: 15.90 s, 14.89 s, 14.17 s)
Secondo
- Gruppo 4 (tempi: 40.49 s)
Terzo
- Gruppo 1 (tempi: 82.47 s, 101.32 s 43.70 s)
Quinti
Per la cronaca, il miglior tempo del mio concorrente è stato 15.18 s.
Congratulazioni, dunque, ai componenti del Gruppo 3.