La convoluzione
La convoluzione rappresenta l'operatore fondamentale utilizzato per filtrare linearmente dei segnali al fine di evidenziare delle frequenze o attenuarne altre.
Contents
Introduzione alla convoluzione
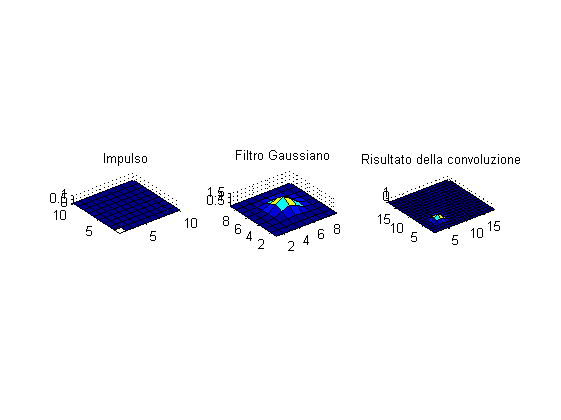
Come noto un filtro è un sistema che trasforma un segnale in un altro, esso stesso è definito tramite il segnale di risposta all'impulso che si vuole ottenere. In ambito digitale il segnale impulso non è la delta di Dirac ma più semplicemente un singolo valore 1 in un segnale contenente soli valori nulli. Si verifichi l'implementazione della convoluzione qui.
% Definiamo l'impulso discreto: I = zeros(10,10); I(1,1) = 1; % Creiamo una risposta all'impulso desiderata: g = fspecial('gaussian',9,1); g = g * 10/ sum(g(:)); % Solo per visualizzazione. % Verifichiamo che l'impulso si comporti come identità: res = convolution(g,I); figure; subplot(131); surf(I); axis equal; title('Impulso'); subplot(132); surf(g); axis equal; title('Filtro Gaussiano'); subplot(133); surf(res); axis equal; title('Risultato della convoluzione');
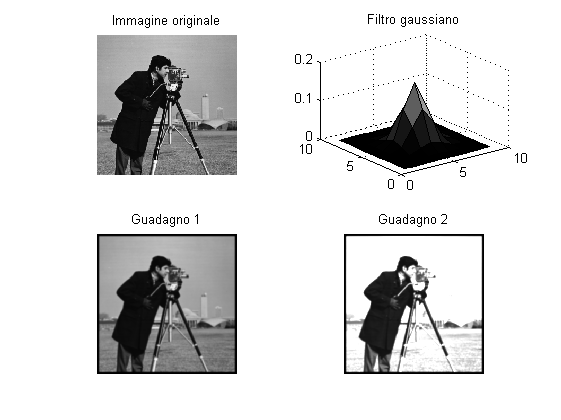
Il guadagno di un filtro è dato dalla somma dei suoi coefficienti:
img = double(imread('cameraman.tif'))/256; g = fspecial('gaussian',9,1); g1 = g / sum(g(:)); g2 = g1 * 2; figure; subplot(221); imshow(img); title('Immagine originale'); subplot(222); surf(g1); title('Filtro gaussiano'); subplot(223); imshow(convolution(g1,img)); title('Guadagno 1'); subplot(224); imshow(convolution(g2,img)); title('Guadagno 2');
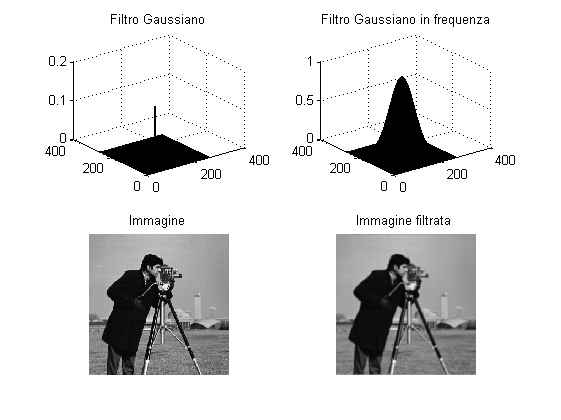
Filtri reali e ideali
% Inizializzazione: img = double(imread('cameraman.tif'))/256; g = fspecial('gaussian',256,1); % Lavoriamo nella frequenza: IMG = fftshift(fft2(img)); G = fftshift(fft2(g)); IMGO = IMG.*G; imgo = abs(fftshift(ifft2(IMGO))); % Vediamo il risultato: figure; subplot(221); surf(g); title('Filtro Gaussiano'); subplot(222); surf(abs(G)); title('Filtro Gaussiano in frequenza'); subplot(223); imshow(img); title('Immagine'); subplot(224); imshow(imgo); title('Immagine filtrata');
Siamo riusciti a ritenere le basse frequenze con un'approssimazione di un filtro reale, se provassimo a forzare il filtro reale?
% Lavoriamo nella frequenza: Gmag = abs(G) > 0.5; Gphase = angle(G); G = Gmag.*exp(1i*Gphase); IMGO = IMG.*G; imgo = abs(fftshift(ifft2(IMGO))); % Vediamo il risultato: figure; subplot(121); imshow(abs(G)); title('Filtro ideale in frequenza'); subplot(122); imshow(imgo); title('Immagine filtrata');

Filtri di convoluzione separabili
Un filtro lineare generico di NxN coefficienti può essere convoluto con un'immagine MxM tramite l'algoritmo vanilla con complessità:

Alcuni filtri però sono separabili, ovvero possono essere rappresentati come convoluzione di filtri di dimensionalità inferiore. Ad esempio:

quindi nel dominio delle frequenze moltiplicare per un filtro gaussiano bivariato può essere ridotto a due moltiplicazioni per due filtri gaussiani monovariati, quindi nel dominio spaziale:

la cui complessità computazionale è:

% Scomponiamo il filtro di prima: gx = g1(ceil(size(g1,1)/2),:); gx = gx / sum(gx); gy = g1(:,ceil(size(g1,1)/2)); gy = gy / sum(gy); % Applichiamolo in entrambe i modi: imgo1 = convolution(g1,img); imgo2 = convolution(gy,convolution(gx,img)); % Confrontiamo i risultati: fprintf('Errore: %g\n',max(abs(imgo1(:)-imgo2(:))));
Errore: 1.33227e-15
Filtri Gaussiani e DoG
Un filtro gaussiano rappresenta un'approssimazione di un filtro passa-basso ideale, nel dominio delle frequenze permette di ritenere frequenze al di sotto di una determinata frequenza di soglia legata alla deviazione standard come segue:

Se si è interessati a una determinata banda di frequenza è possibile comporre i risultati dell'applicazione di due differenti filtri, ad esempio se si intendono mantenere le frequenze tra 0.08 (sigma = 2) e 0.16 (sigma = 1) è possibile applicare due filtri e calcolarne la differenza:

% Preparazione dei filtri: g1 = fspecial('gaussian',13,1); g2 = fspecial('gaussian',13,2); % Applicazione: imgo = filter2(g1-g2,img); % Vediamo il risultato: figure; subplot(121); imshow(img); title('Immagine originale'); subplot(122); imshow(imgo*2); title('Filtro passa-banda'); % *2 per visualizzazione.

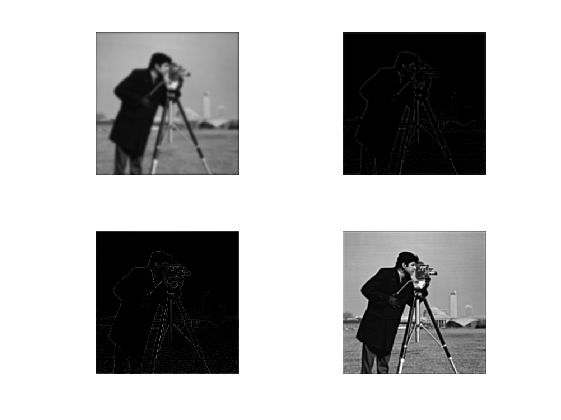
Il risultato mostra solamente le componenti in una determinata banda di frquenza, ovvero i bordi dell'immagine appartenenti a quella banda. Un'immagine può essere scomposta in componenti a frequenze differenti evidenziando valor medio e bordi a differenti frequenze. DoG sta per Difference of Gaussians e permette di ricavare per ogni pixel dei coefficienti che ne descrivano in frequenza il comportamento. Avendo scelto in questo esempio 2 frequenze abbiamo 3 componenti:
% Componente a frequenza più bassa: imglow = filter2(g2,img); % La banda di frequenza selezionata prima: imgmid = imgo; % Il resto a frequenza più alta: imghigh = img - imglow - imgmid; % Vediamoli: figure; subplot(221); imshow(imglow); subplot(222); imshow(imgmid); subplot(223); imshow(imghigh); subplot(224); imshow(imglow+imgmid+imgmid);