
 |
 |
 |
The project
Palmprint recognition systems achieve sufficiently-accurate recognition ability and the acquisition is generally well accepted by the users, since it is not perceived as too intrusive or privacy-sensitive. Moreover, palmprints can be captured using low-cost devices and, unlike fingerprints, have enough redundancy for being used even in the case of partially damaged palm surface, like in elder people or manual workers. Unfortunately, traditional palmprint-based systems adopt touch-based acquisitions with pegs constraining the position of the hand to facilitate biometric trait collection, thus still limiting easy usability.
This project has the objective of researching innovative methods for the contactless and less-constrained recognition of the palmprint. In particular, the researched methods allow to recognize the individuals without the contact of the hand with any surface, and without the need for the user to place his hand in a specific position. For this purpose, a metric three-dimensional representation is used.
The originality of the researched techniques allow to perform an accurate biometric recognition, with a focus on the usability, computational speed, and social acceptance of the system. Moreover, the cost of the final device is also taken into consideration. The novelty of the described method, with respect to similar methods in the literature based on contactless three-dimensional acquisitions, resides in the use of an innovative setup, which has a lower cost and captures the images faster.
The method
These methods are able to perform the contactless palmprint recognition with a reduced number of constraints with respect to the majority of the approaches in the literature. In particular, the hand does not touch any surface, and the user is not required to place his hand in a specific position, but only to place it horizontally inside a volume, represented by the intersection of the field of views of the cameras, and the areas that are sufficiently close to the illumination. Moreover, the user is not required to spread his fingers or open his hand in a specific way. The use of three-dimensional reconstruction techniques permits a description of the palm that is invariant to the pose of the hand and the acquisition distance. With respect to the contactless three-dimensional palmprint recognition methods proposed in the literature, the researched methods perform a faster acquisition, and are able to work using an innovative low-cost setup, composed of a two-view acquisition system and a led illumination.
The algorithm
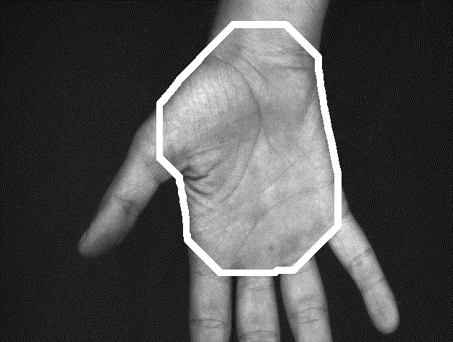
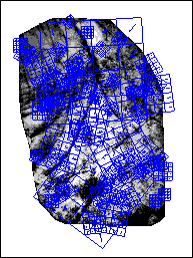
The researched method for the palmprint recognition using acquisitions performed with uncontrolled distance can be divided into several steps. First, the acquisition setup is calibrated, then a multiple-view less-constrained contactless acquisition is performed, using a uniform led illumination. The images are preprocessed in order to segment the palm region. Then, the three-dimensional processing of the palmprint is performed: first, the three-dimensional model of the palmprint is reconstructed, then the model is registered in order to normalize the pose and the distance. A three-dimensional image registration is performed by reprojecting the models on the image plane using the calibration data. The corresponding texture images are enhanced, then the two-dimensional features are extracted and matched. A three-dimensional feature extraction and matching step is used to further refine the matching.
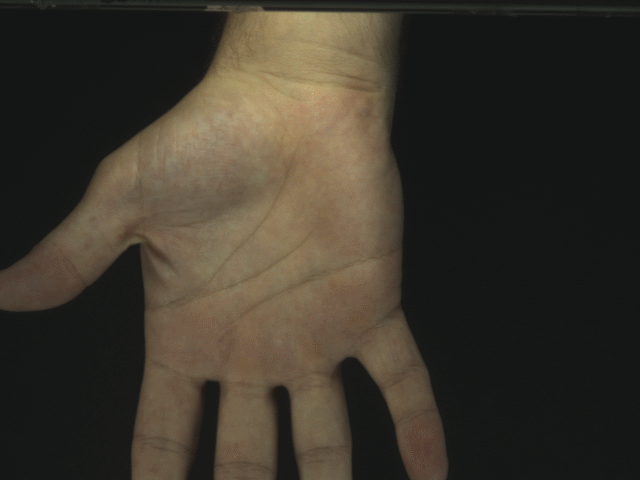
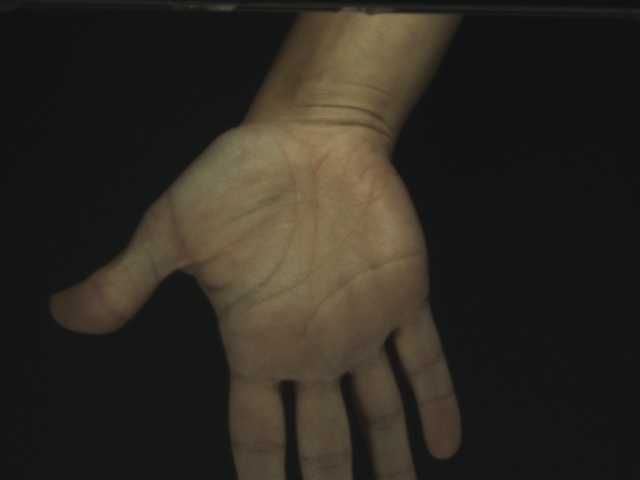
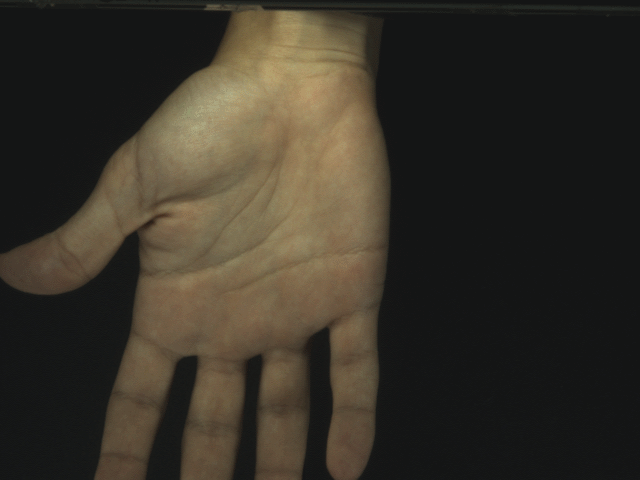
Examples of touchless and
less-constrained acquisitions
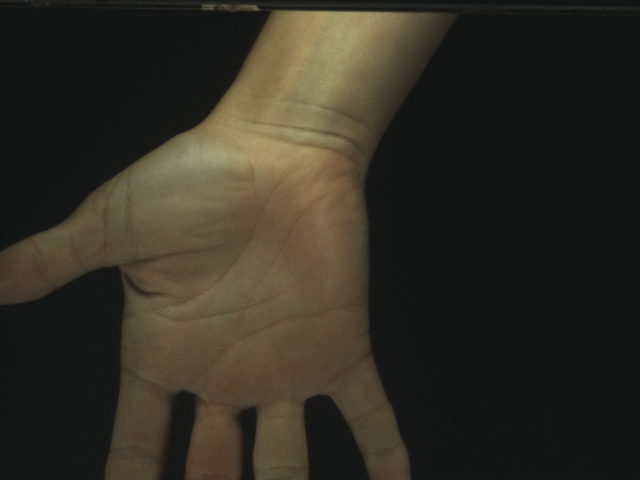
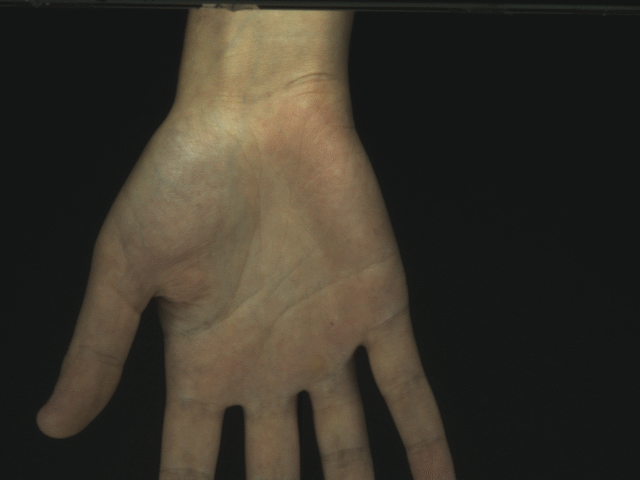
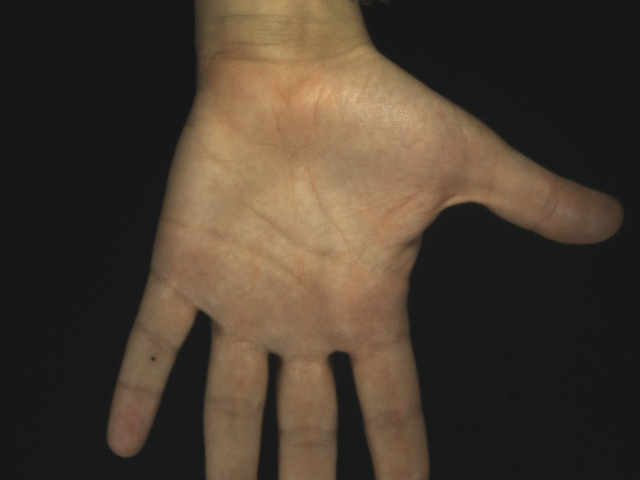
In the figure, it is possible to observe different examples of touchless and less-constrained acquisitions performed using the proposed method.
| (a) | (b) | (c) |
 |
 |
 |
| (d) | (e) | (f) |
 |
 |
 |
| (g) | (h) | (i) |
 |
 |
 |
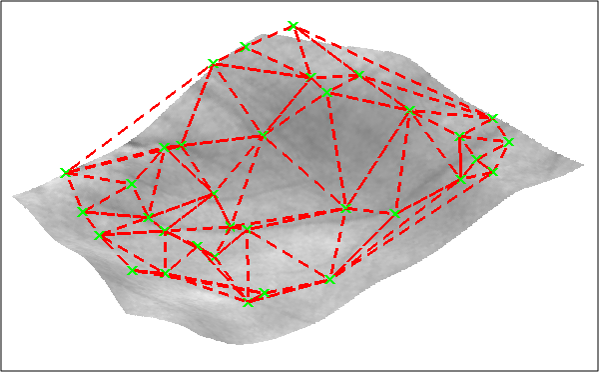
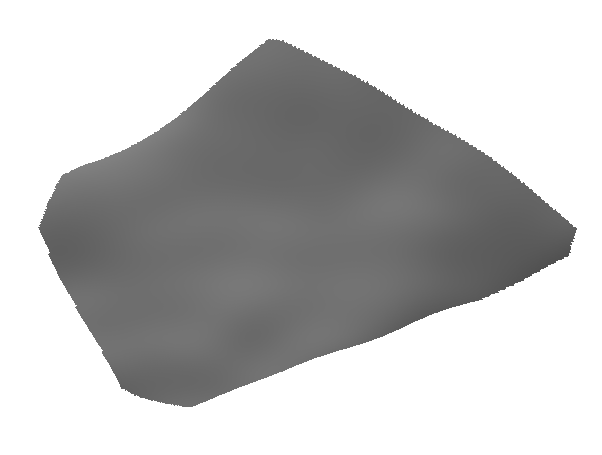
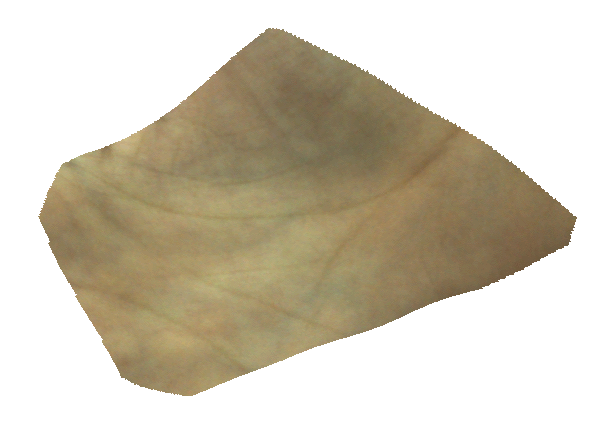
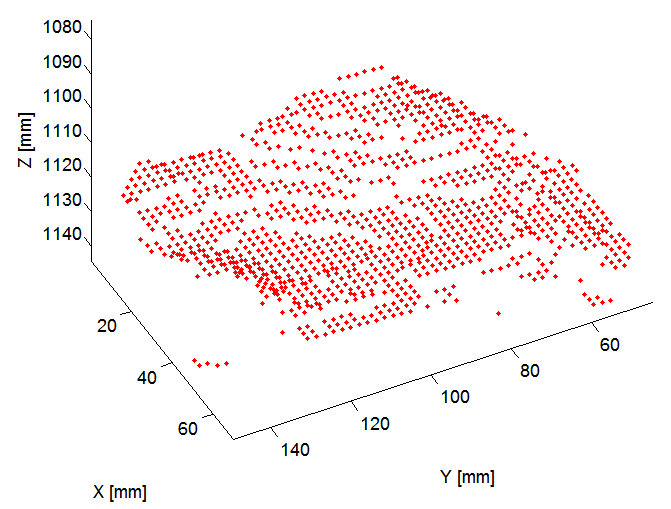
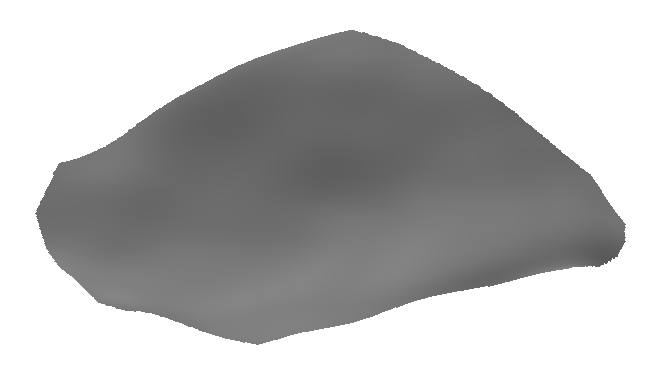
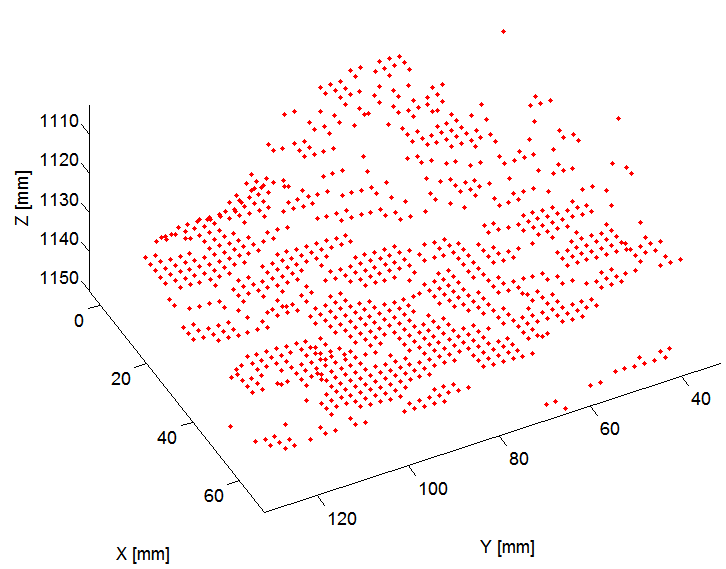
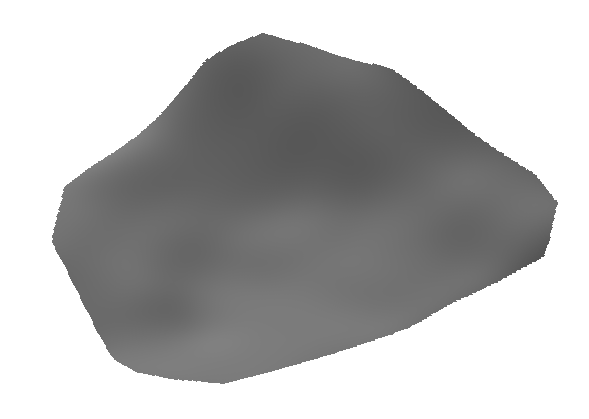
Examples of three-dimensional models
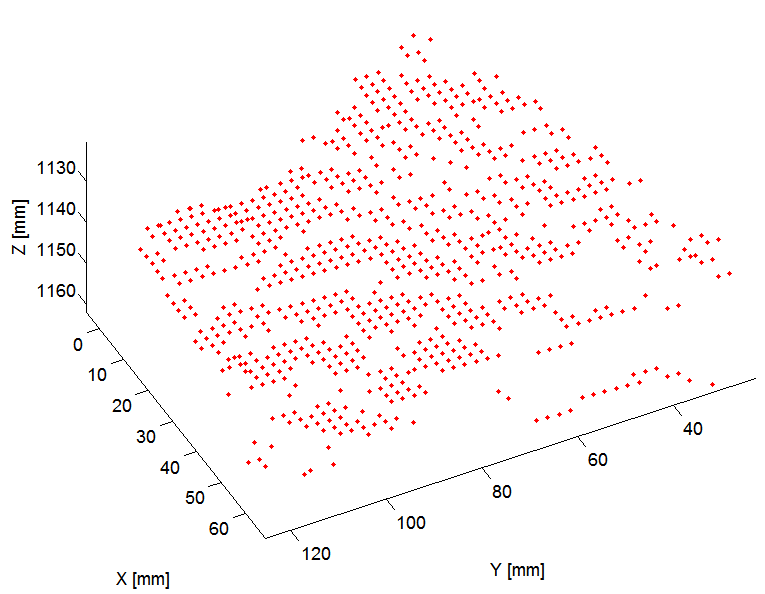
In the figure, it is possible to observe some examples of the reconstructed three-dimensional point clouds, the interpolated surfaced, and the corresponding texture mapping.
| (a) | (b) | (c) |
 |
 |
 |
| (d) | (e) | (f) |
 |
 |
 |
| (g) | (h) | (i) |
 |
 |
 |
Related publications
- A. Genovese, V. Piuri, and F. Scotti, Touchless Palmprint Recognition Systems, ser. Advances in Information Security, S. Jajodia (ed.), vol. 60, Springer International Publishing, September, 2014. ISBN: 978-3-319-10365-5. [DOI: 10.1007/978-3-319-10365-5] [BibTex entry]
- Angelo Genovese, "Contactless and less-constrained palmprint recognition", Ph.D. Dissertation, Universita' degli Studi di Milano, Italy, March, 2014 [DOI: 10.13130/genovese-angelo_phd2014-03-18] [BibTex entry]
Acknowledgements
This work was partly funded by the European Commission under the project ABC4EU (contract n. FP7-312797) and the Italian Ministry of Research within PRIN project ”GenData 2020” (2010RTFWBH).
People
- Angelo Genovese (proposer and maintainer), angelo.genovese AT unimi.it
- Vincenzo Piuri, vincenzo.piuri AT unimi.it
- Fabio Scotti, fabio.scotti AT unimi.it
Downloads
Under construction...